Quartzlock - Biuletyn
Techniki GPS - transfer czasu i częstotliwości wzorcowej- krótki przegląd
Transfer czasu i częstotliwości GPS to metoda umożliwiająca wielu stronom udostępnienie dokładnego czasu odniesienia. Transfer czasu i częstotliwości GPS rozwiązuje problemy, takie jak obserwatoria astronomiczne, które korelują obserwowane błyski lub inne zjawiska ze sobą. Opracowano wiele technik, często przenosząc synchronizację zegara odniesienia z jednego punktu do drugiego, często na duże odległości. Dokładność zbliżona do jednej nanosekundy na świecie jest ekonomicznie praktyczna dla wielu zastosowań. Radiowe systemy nawigacyjne są często stosowane jako systemy przesyłu czasu i częstotliwości.
W niektórych przypadkach wielokrotne pomiary są wykonywane w pewnym okresie czasu, a dokładna synchronizacja czasu jest określana retrospektywnie.
1. W jedną stronę
2. Wspólny widok
3. Wszystko w widoku
4. Faza przewoźnika
5. Przesyłanie czasu za pomocą Quartzlock E8000-TT
Jednokierunkowa
Jednokierunkowa technika GPS wykorzystuje sygnały uzyskane z odbiornika GPS jako odniesienie dla kalibracji. Sygnały GPS są używane w czasie rzeczywistym, aby zsynchronizować zegar lokalny i czas GPS lub UTC. Celem pomiaru jest zwykle synchronizacja impulsu na czas lub kalibracja źródła częstotliwości. Zanim odbiornik zostanie użyty do pomiarów, musi zakończyć proces akwizycji sygnału. Częścią procesu akwizycji jest badanie pozycji anteny. W przeciwieństwie do odbiorników nawigacji GPS (SAT NAV), które obliczają poprawki pozycji podczas ruchu (często w tempie szybszym niż jedno ustalenie pozycji na sekundę), odbiorniki czasu i częstotliwości GPS zwykle nie poruszają się i dlatego nie muszą obliczać poprawek pozycji po badaniu jest zakończony.
Dlatego odbiorniki czasu i częstotliwości zwykle przechowują poprawkę o pojedynczej pozycji i od tej pory używają tej samej pozycji. Wiele odbiorników automatycznie uruchamia ankietę po ich włączeniu.
Po zakończeniu akwizycji sygnału wyjściowego z odbiornika jest on podłączony do systemu pomiarowego. W przypadku pomiarów synchronizacji czasu, sygnał 1 PPS z odbiornika jest zwykle używany jako sygnał wejściowy do licznika przedziału czasowego. W przypadku pomiarów częstotliwości, wyjście częstotliwości 10 MHz z GPSDO jest wykorzystywane jako wejście do komparatora fazowego lub wykorzystywane jako zewnętrzna baza czasu dla urządzeń testowych, takich jak liczniki częstotliwości i generatory sygnałów.
Ponieważ satelity GPS przekazują sygnały sterowane do UTC, długoterminowa dokładność odbiornika GPS zawsze była doskonała.
Na dokładność impulsu czasowego (1PPS) wpływa opóźnienie kabla antenowego. Jest to około 4ns / m i można na to pozwolić, kompensując wyjście 1PPS. Istnieje również zależny od konstelacji błąd między czasem UTC i GPS wynoszącym maksymalnie ± 15ns. Odbiornik czasu zazwyczaj ma dokładność ± 15 ns (1sigma) do czasu GPS. Można osiągnąć końcową dokładność około ± 30ns do UTC.
Wspólny widok
Metoda wspólnego widoku to prosty, ale elegancki sposób porównania dwóch zegarów lub oscylatorów znajdujących się w różnych miejscach. W przeciwieństwie do jednokierunkowych pomiarów, które porównują zegar lub oscylator z GPS, pomiar wspólnego widoku porównuje dwa zegary lub oscylatory ze sobą.
Satelita GPS (S) służy jako pojedynczy nadajnik odniesienia. Porównano dwa zegary lub oscylatory i mierzono je na dwóch odbiornikach GPS. Satelita jest wspólny dla obu odbiorników i oba jednocześnie odbierają sygnały. Każdy odbiornik porównuje odebrany sygnał z lokalnym zegarem i rejestruje dane. Następnie dwa odbiorniki wymieniają dane.
Widok ogólny bezpośrednio porównuje dwa standardy czasu i częstotliwości. Błędy z dwóch ścieżek, które są wspólne dla odniesienia, anulowane, w tym działanie zegara satelitarnego.
Zaletą tej techniki jest minimalizacja pewnych błędów, które mogą występować. Błędy zegara satelitarnego są całkowicie wyeliminowane, ponieważ są powszechne w obu odbiornikach. Błędy efemerydów w przesyłanych danych i wpływające na obliczanie ścieżek są zminimalizowane. Jednak główną wadą w odniesieniu do trybu jednokierunkowego jest to, że dane między odbiornikami muszą być wymieniane.
Widok ogólny wymaga odbiornika GPS, który może odczytać harmonogram śledzenia. Harmonogram ten informuje odbiorcę, kiedy rozpocząć pomiar i który satelita śledzić. Odbiornik w innej lokalizacji dokonuje pomiarów z tego samego satelity w tym samym czasie. Dane zebrane na obu stronach są następnie wymieniane i porównywane.
Widok na wszystko
Tryb All in view może służyć do synchronizacji zegarów na szeroko odseparowanych odległościach. W przeciwieństwie do trybu widoku ogólnego, tryb "wszystko w widoku" nie wymaga równoczesnych obserwacji przez obie stacje; wymaga tylko, aby każda stacja obserwowała jak najwięcej satelitów w ciągu dnia, które może śledzić jej odbiornik.
Indywidualny czas GPS w porównaniu z porównaniami czasu lokalnego jest zbierany w pewnym okresie czasu. Liniowe dopasowanie tych punktów jest uważane za przesunięcie czasu GPS od czasu lokalnego standardu. Odejmowanie czasu przesunięcia jednego lokalnego standardu od drugiego daje różnicę czasu między dwiema lokalizacjami.
Ta metoda jest bardziej niezawodna niż tryb wspólnego widoku, ponieważ w ciągu dnia obserwuje znacznie więcej satelitów. Dlatego jest bardziej odpowiedni dla nienadzorowanych systemów synchronizacji, ponieważ wartości przesunięcia są bardziej stabilne, a system jest bardziej odporny na sporadyczne przerwy w danych, ponieważ przesunięcie jest obliczane na podstawie kilku pomiarów.
Wadą jest to, że przetwarzanie końcowe jest wymagane, a różnica czasu nie jest dostępna w czasie rzeczywistym.
Przekaźniki
Ta technika wykorzystuje częstotliwości nośne L1 i L2 zamiast kodów transmitowanych przez satelity. Ważne jest, aby pamiętać, że pomiary fazy nośnej mogą być jednokierunkowymi pomiarami wykonywanymi w czasie rzeczywistym lub po przetworzeniu wspólnych pomiarów widoku.
Obliczana jest różnica faz między oscylatorem satelitarnym a lokalnym oscylatorem odbiornika. Jednakże, obserwowana faza jest niejednoznaczna, faza jest mierzona modulo 2đ i można zmierzyć tylko fazę ułamkową, podczas gdy pseudo zakres jest absolutnie obserwowalny. Przesunięcie absolutne pomiędzy zdalnymi zegarami jest wtedy określone tylko przez informację kodu, podczas gdy fazy nośne dają dokładną ewolucję sygnału. Zastosowanie informacji o pseudo zakresie wraz z informacją o fazie nośnej zwiększa dokładność do współczynnika 1000.
Ponieważ technika GPS w fazie nośnej wymaga geodezyjnych odbiorników GPS, a także dokonywania korekt zebranych danych przy użyciu modeli orbitalnych, jonosfery i troposfery oraz ekstensywnego przetwarzania końcowego, nie jest praktyczne do codziennych pomiarów. Technika ta jest jednak wykorzystywana do celów eksperymentalnych i do międzynarodowych porównań między pierwotnymi standardami częstotliwości, gdy celem jest możliwie jak największe zmniejszenie niepewności pomiaru.
Transfer czasu za pomocą Quartzlock E8000-TT
Firma Quartzlock właśnie rozszerzyła swój zakres czasu i referencji GPS o nowy, ekonomiczny odbiornik GPS All in View One Way z satelitą i częstotliwością E8000-TT z odniesieniem czasu i częstotliwości GPS z wygładzonym wyjściem 1PPS zsynchronizowanym z UTC.
Mechanizm kwarcowy wykorzystuje jednokierunkowy tryb wszystkich widoków, w którym każda strona jest porównywana ze średnią czasu GPS, uzyskaną dzięki temu, że odbiornik generuje średnią ze wszystkich śledzonych satelitów. Jeśli konstelacja jest prawie taka sama w każdym miejscu, wynik średniej może być bardzo zbliżony w każdym miejscu.
Projekt E8000
E8000 używa komercyjnego odbiornika GPS. Spowoduje to wykonanie samodzielnej ankiety po przeniesieniu do nowej lokalizacji i zapisze uśrednioną pozycję. Zapisana pozycja jest używana po zresetowaniu urządzenia i zachowuje ważność pod warunkiem, że urządzenie nie zostanie przeniesione.
Z prawidłową zapamiętaną pozycją, odbiornik GPS przełącza się w ponad ustalony tryb zegara, i wykorzystuje wszystkie satelity w celu zapewnienia najlepszego możliwego oszacowania czasu GPS, wysyłając jako narastającą krawędź impulsu co sekundę (1PPS).
Dwie lub więcej jednostek E8000-TT zapewni niezwykle dokładne przesyłanie czasu na średnich liniach bazowych, nawet do kilkuset kilometrów.
Wyjście 1PPS z odbiornika GPS jest modulowane fazowo za pomocą piły o szczytowej amplitudzie około 12ns. Jest to spowodowane rozdzielczością zegara skończonego używaną w odbiorniku GPS.
E8000 wykorzystuje filtr Kalmana do a) skorygowania lokalnego zegara, którym jest OCXO, oraz b) wygładzenia 1PPS i usunięcia modulacji zębów piły. Ewentualne wyjście 1PPS z E8000-TT ma krótkoterminowe fluktuacje fazowe poniżej 1ns RMS.
Czas GPS może różnić się od UTC aż do ± 15ns (średnie 1 godziny), z czasami szczytowymi przy ± 20ns (patrz dane zarchiwizowane NIST). Jednak w przypadku stosowania krótkiego lub średniego czasu bazowego, oba odbiorniki będą w dużej mierze miały tę samą konstelację, a zatem zobaczą to samo przesunięcie względem czasu UTC.
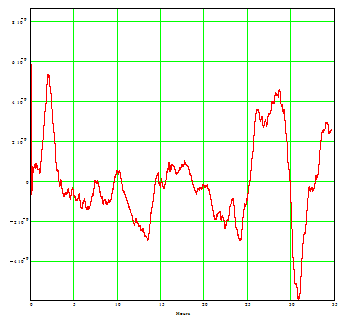
Pomiary na dwóch odbiornikach E8000-TT z antenami współdzielonymi (zero linii bazowej) wykazały typowe różnice czasowe (średnie 1 godziny) ą3ns, z przypadkowymi pikami przy ą5ns. Zwykle istnieje stała różnica czasu do 30ns, którą można usunąć po uruchomieniu kalibracji. Wyjście 1PPS z odbiornika E8000-TT może być przesunięte do ą 500 ms z krokiem 1ns.
Specyfikacja (typowe wyniki)
Wykorzystanie 2 odbiorników Quartzlock E8000-TT z identycznymi antenami współdziałającymi i długościami kabli.
Naprawiono różnicę czasu przed kalibracją: maksimum ± 50ns
Naprawiono różnicę czasu po kalibracji: ą 5ns
Różnica wariacji czasowych (średnio 10 minut): ą 10ns
Różnica wariacji czasowych (średnia z 1 godziny) ± 6ns
Analiza różnicy 1PPS między 2 mechanizmem kwarcowym E8000A-TT
Wygładzona wersja danych 1-godzinna średnia ruchoma
In this issue QUARTZLOCK NEWSLETTER
Reducing Instrument and Test System Noise
What is phase noise and its effect
Phase noise is the frequency domain representation of rapid, short-term, random fluctuations in the phase of a waveform, caused by time domain instabilities ("jitter"). Generally speaking, radio frequency engineers speak of the phase noise of an oscillator, whereas digital system engineers work with the jitter of a clock.
Phase noise is one of the causes of poor quality radio transmissions; it limits the operating range of radar and causes bit errors in Phase Shift Keyed digital modulation
Noise can have numerous adverse effects on system performance. Some of these effects are:
1. It limits the ability to determine the current state and the predictability of precision oscillators
2. It limits synchronization and synchronization accuracies;
3. it can limit a receiver’s useful dynamic range, channel spacing, and selectivity;
4. it can cause bit errors in digital communications systems;
5. It can cause loss of lock, and limit acquisition and reacquisition capability in phase locked loop systems;
6. It can limit radar performance, especially Doppler radar.
For example in surveillance, Doppler radars especially require low-noise oscillators. The velocity of the target and the radar frequency are primary determinants of the phase noise requirements. Slow-moving targets produce small Doppler shifts; therefore, low phase noise close to the carrier is required. To detect fast-moving targets, low noise far from the carrier is required. For example, when using an X-band radar to detect a 4kmjhour target (e.g., a slow moving vehicle), the noise 70 Hz from the carrier is the important parameter, whereas to detect supersonic aircraft, the noise beyond 10 kHz is important.
The combination of low flicker and low noise floor improves the bit error rate of a digital communication system for a given modulation scheme since the BER increases with the area under the phase noise curve. This small integrated noise or phase jitter similarly improves the resolution and probability of detection of radars and enhances the accuracy of distance measuring devices. Modern spectrum analyzers using low noise synthesized local oscillators have improved sufficiently to allow for the direct observation of sideband noise of fairly good sources. A higher performance reference would lower than local oscillator noise even further, making smaller measurement bandwidths feasible for direct measurement of all but the best sources.
The most commonly used reference frequency is 10MHz, however, work on 5MHz core oscillator with doubler are increasingly being considered. -123dBc/Hz @ 1Hz phase noise at 5MHz is a low cost option if the reference input allows, or doubled to 10MHz, even when doubler noise and loss are considered. -175dBc/Hz noise floor seems de-rigor for 2012.
The OCXO, however stable needs an external phenomenon to lock, for at least a 100x improvement in accuracy / drift. GPS and Rubidium are the obvious choices. Here the tune / lock line needs very careful design consideration. GPS effectively removes drift / year, 2E-12/day. Rubidium will achieve 4E-10 / year and improving Rubidium is antenna free, an advantage for many users as the GPS service cannot be guaranteed. Antennas come down in storms; wires get accidentally cut and connections become loose. Recent developments show that GPS signals can be disrupted due to solar events (solar flares) and Earth based signals (intentional and unintentional) operating in or near the GPS band.
The OCXO, however stable needs an external phenomenon to lock, for at least a 100X improvement in accuracy/drift. GPS and Rubidium are the obvious choices. Here the tune/lock line needs very careful design consideration. GPS effectively removes drift/year. Rubidium will achieve 4E-10/year and improving Rubidium is antenna free, an advantage for many users.
Add to the ideal reference a compatible low noise distribution amplifier, built into the reference with say 8 outputs then the complete RF and microwave system will see significant benefits:
1 All system instruments will now be on the same frequency
2 Most instruments will see a very significant improvement in phase noise (many instruments have noise floor problems of their own….outside reference control)
3 Considerable improvement in Allan Variance short term stability.
Typical instruments/system elements to benefit include:
Spectrum Analyzers, Digital Storage Oscilloscopes, Microwave Analyzers, Frequency Counters, Surveillance Receivers, Panoramic Receivers, Signal Stability Analyzers, Signal Sources, GPS Air Interface Simulators and GPS Simulation Systems. These are referencing applications. Calibration and standards laboratory uses are common.
Quartzlock has a number of low and ultra low noise references that will enable customer systems to take advantage of these benefits in both their applications and in house testing facilities.
